 RSS Feed
RSS Feed
|
Our design is a wooden plank that will be mounted to the dock of the Ala Wai. the computer will be on one end of the board and connect to the Arduino and breadboard which will be in their own 3-D housings. at the end of the board we will have a hollowed out 3-D printed box that will house a motor. The motor will be powering a spool and will be programmed to rotate a certain amount in order to reach the different depths required. the temperature sensor will be wrapped around the spool and the spool will be 2 inches long so that the sensor will be able to wrap around the spool nicely. The board will be 5 inches wide and 4 1/2 inches wide so it is able to house the motor nicely.
0 Comments
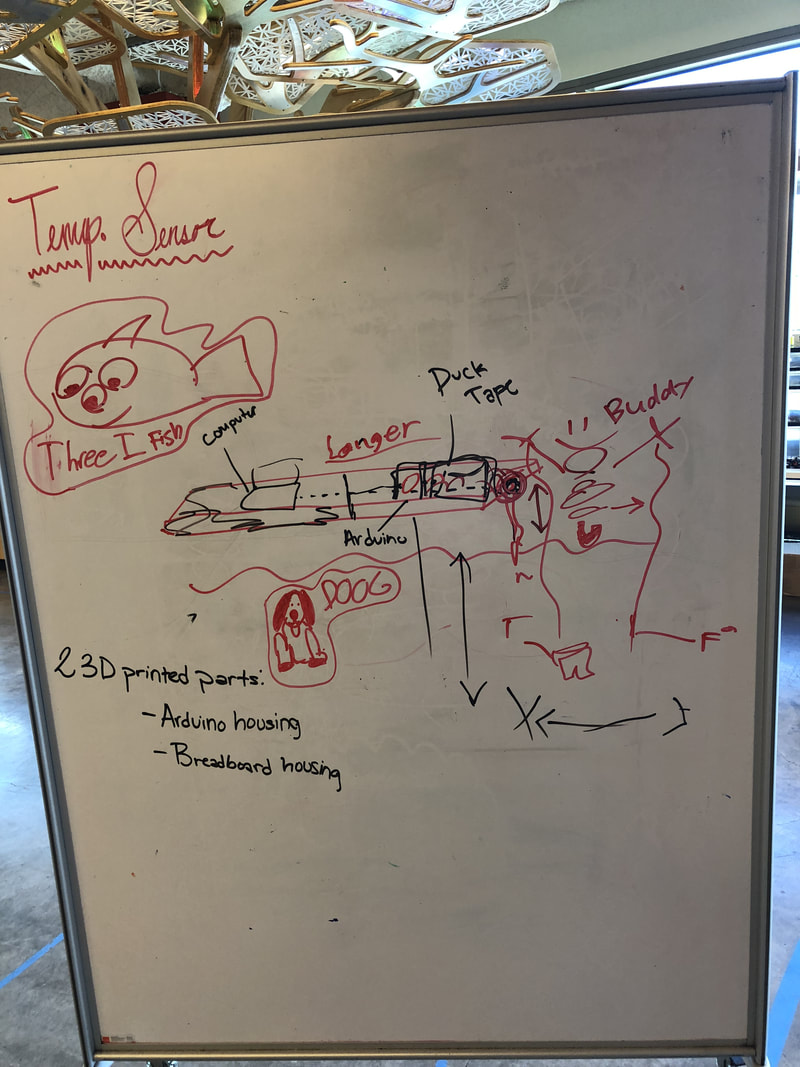 The temperature sensor will have a motorized gear to move the temperature sensor between depth levels that were required. The housing for the motor will be 3-D printed taking care of one 3-D printed and the housing for the arduino and breadboard will also be 3-D printed making two 3-D printed parts in total. It will be able to connect the arduino with the extended arduino cord and a plexiglass backing. The LED will be able to indicate if the temperature of the water is at a dangerous level 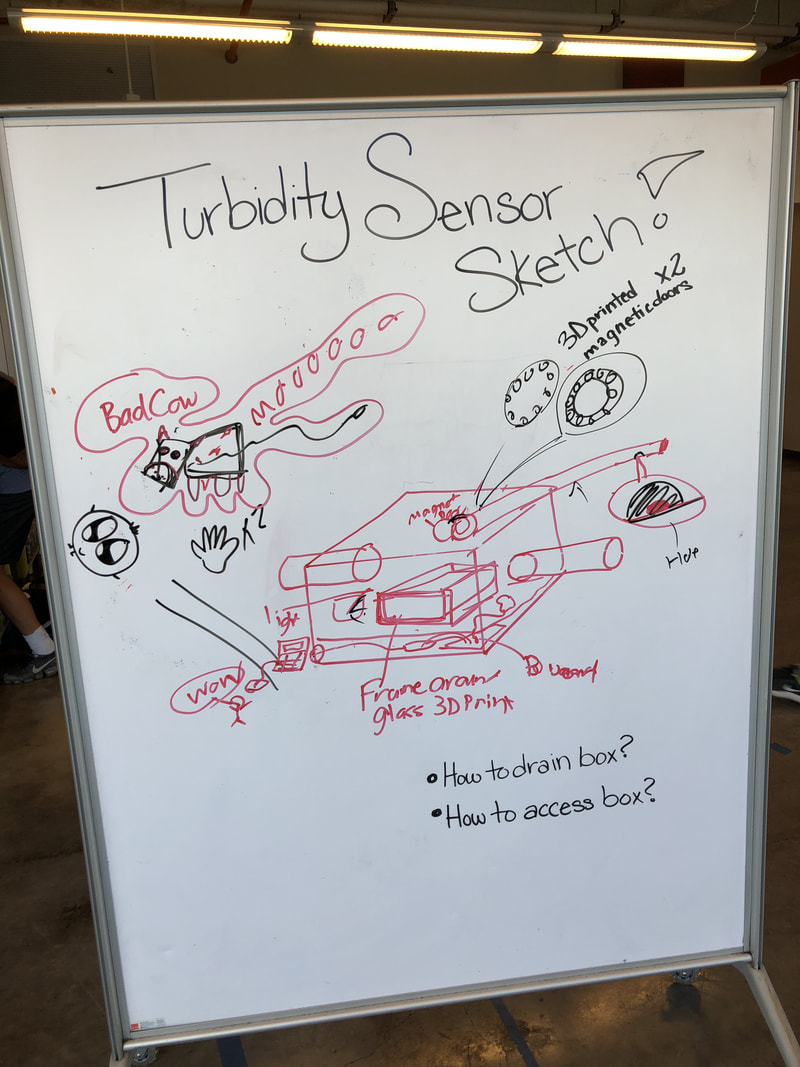 The Turbidity sensor will be able to protect the arduino and turbidity sensor by collecting water samples through the front pole and gathering the water into a basin within the box. The turbidity sensor then will be able to determine the turbidity of the sensor and from that indicate if the water is at a dangerous, normal, or above average, turbidity lighting up the corresponding LED. The cord then will be able to attach to the computer through a whole outside of the computer.
Turbidity Sensor
- needs to be clear and not reflective for the turbidity sensor to detect light - needs to be able to connect to the computer for power. - water proof housing - needs to be able to visually show the turbidity level - constantly update data - able to extend to different depths - if not floating then handheld - reasonably sized - a base value for the sensor to go off of Temperature Sensor - needs to be able to touch the water -visually show temperature - extend to different depths - A temperature sensor will be programmed with Ardunio. The temperature sensor we are going to be using is already waterproofed making it very easy to adapt to. The sensor measures in Celsius and uses the steel tip to get the temperature. It is not to be used in salt water environments. Sample code below (turbidity) 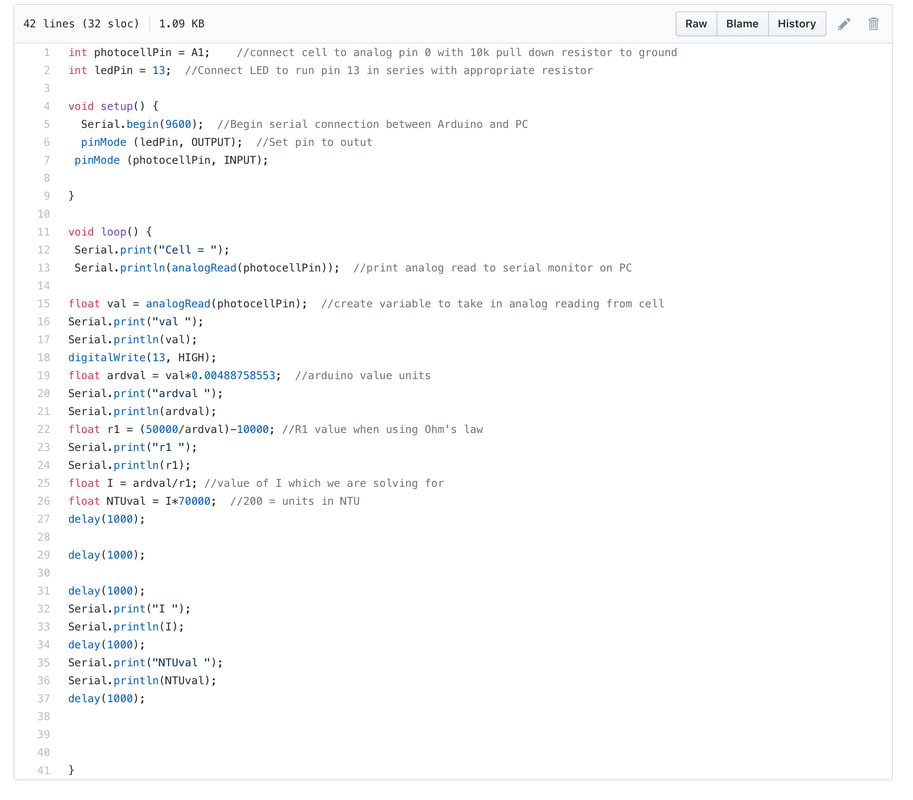 Wde will be using a turbidity and temperature sensor. To make these sensors function, we will be programming them using a Arduino. To program these sensors we must first understand how it works. From information gotten from DFRobot on YouTube, a turbidity sensor works by seeing the amount of lights that can go through the water. Turbidity is measured in NTU’s. The cloudier the water, the higher the NTU of the water is. The turbidity sensor however, will send the reading in voltages. It is good to note however, that as the turbidity or NTU increases, then the voltage should actually decrease in the output. Therefore we will have to translate the voltages into NTU’s. The turbidity sensor goes through a micro converter. This means that before the turbidity sensor sends information to the arduino, it will rise send it to the micro converter in order to “translate”. The output mode is then able to switch between analog mode and digital mode. In digital mode, the turbidity sensor will connect to a digital pin and sends out a 5V signal when the turbidity of something reaches a certain threshold value. This value can be set using the potentiometer on the micro controller. Programming one of these sensors does not take a separate imported library. However,since the number may range into the decimal area, it is pretty likely that we are going to use floats and doubles rather than ints. A float adn double are both types of variables that store or represent floating point number or put simply, decimals. The difference between the two is that a double is a variable that can store a number more accurately having up to 15 decimal places. A float however normally only stores about 6 to 8. Although a double now sounds more enticing, we must realize that another difference between the two is the amount of storage each takes. A double normally takes around 8 bytes while a float takes only about half of that being 4 bytes. Therefore, in this project it may be better for me to use a float rather than a double for the purpose of saving more storage. Now to wire a Turbidity sensor, we can follow the diagram below. 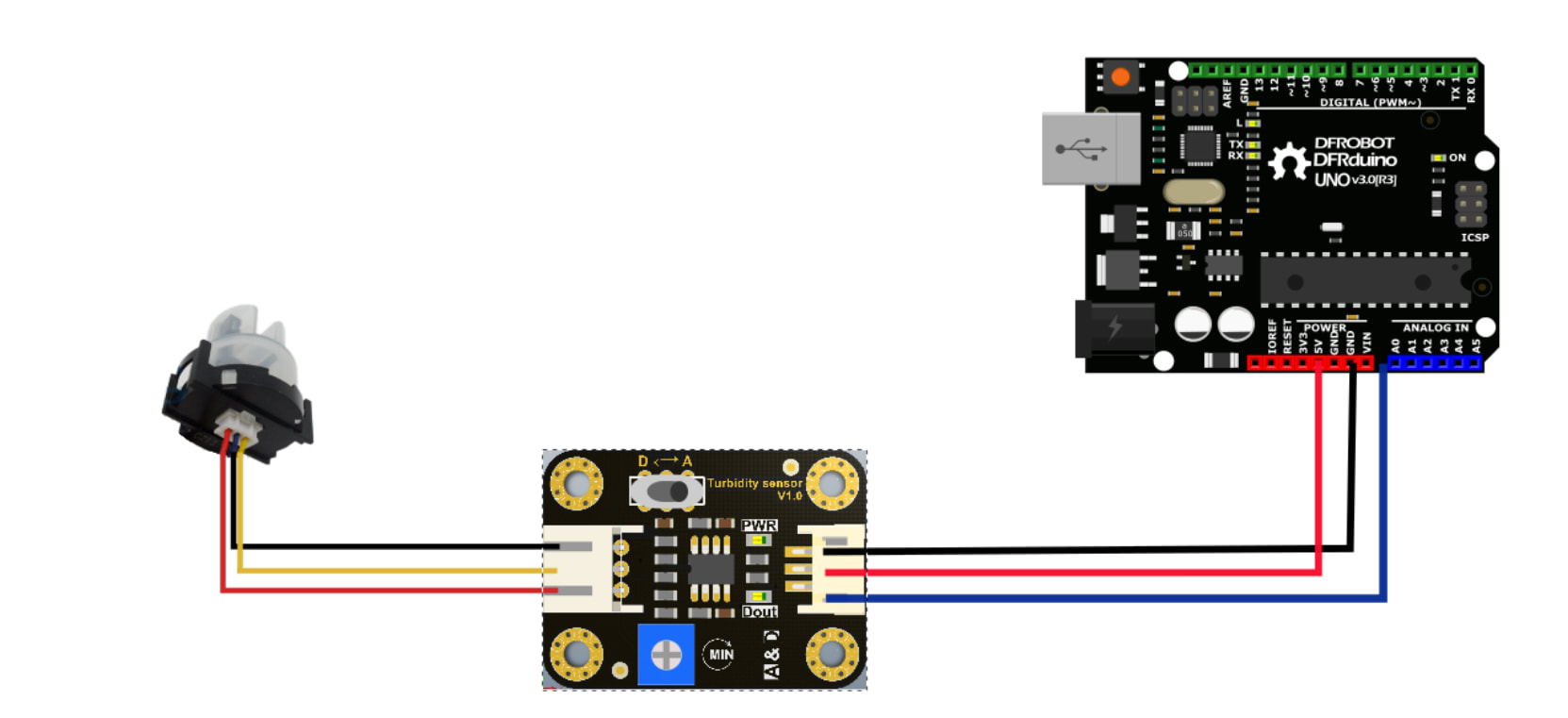 The problem my partner and I are trying to solve is how to build a temperature sensor and a turbidity sensor.
|
AuthorWrite something about yourself. No need to be fancy, just an overview. Archives
May 2018
Categories |
Photo used under Creative Commons from daryl_mitchell
